PRODUCTS
M700C
FITTINGS

- Danjo 1/8″ BSPP
- M6 Male Fitting
- JIC 7/16″ F. Swivel
- BSPP 1/8″ F. Swivel
- Hydraulic adaptors
HOSES

- MINIMESS®-DN2 Microbore
345 bar (5000 psi)
CYLINDERS

- Cylinder Ø30 x 100 mm
- Cylinder Ø30 x 50 mm
- Cylinder Ø20 x 200 mm
210 bar (3000 psi)

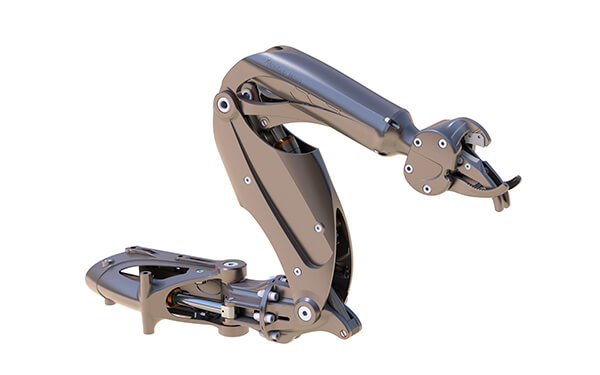
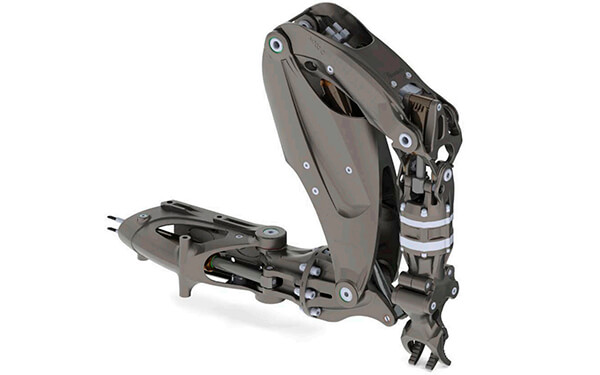
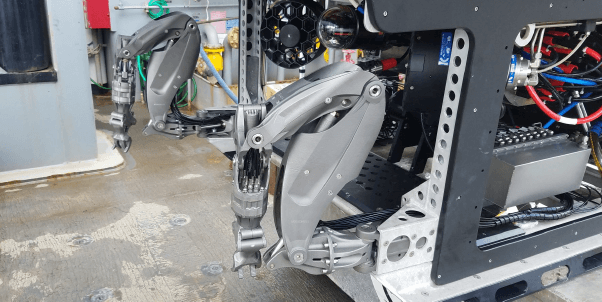
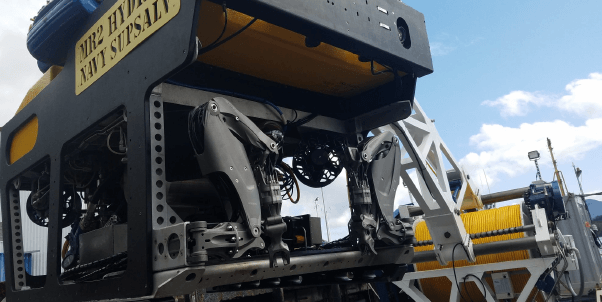
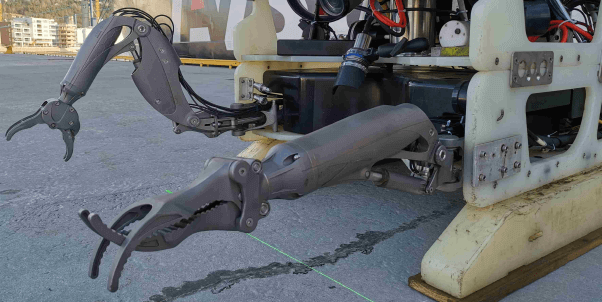
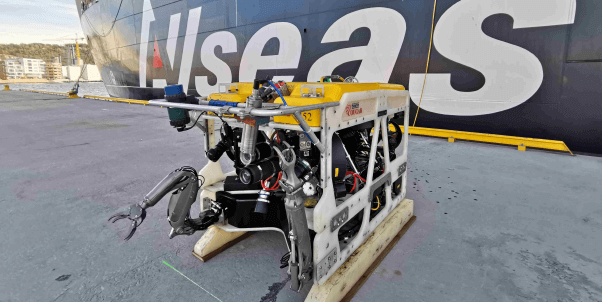
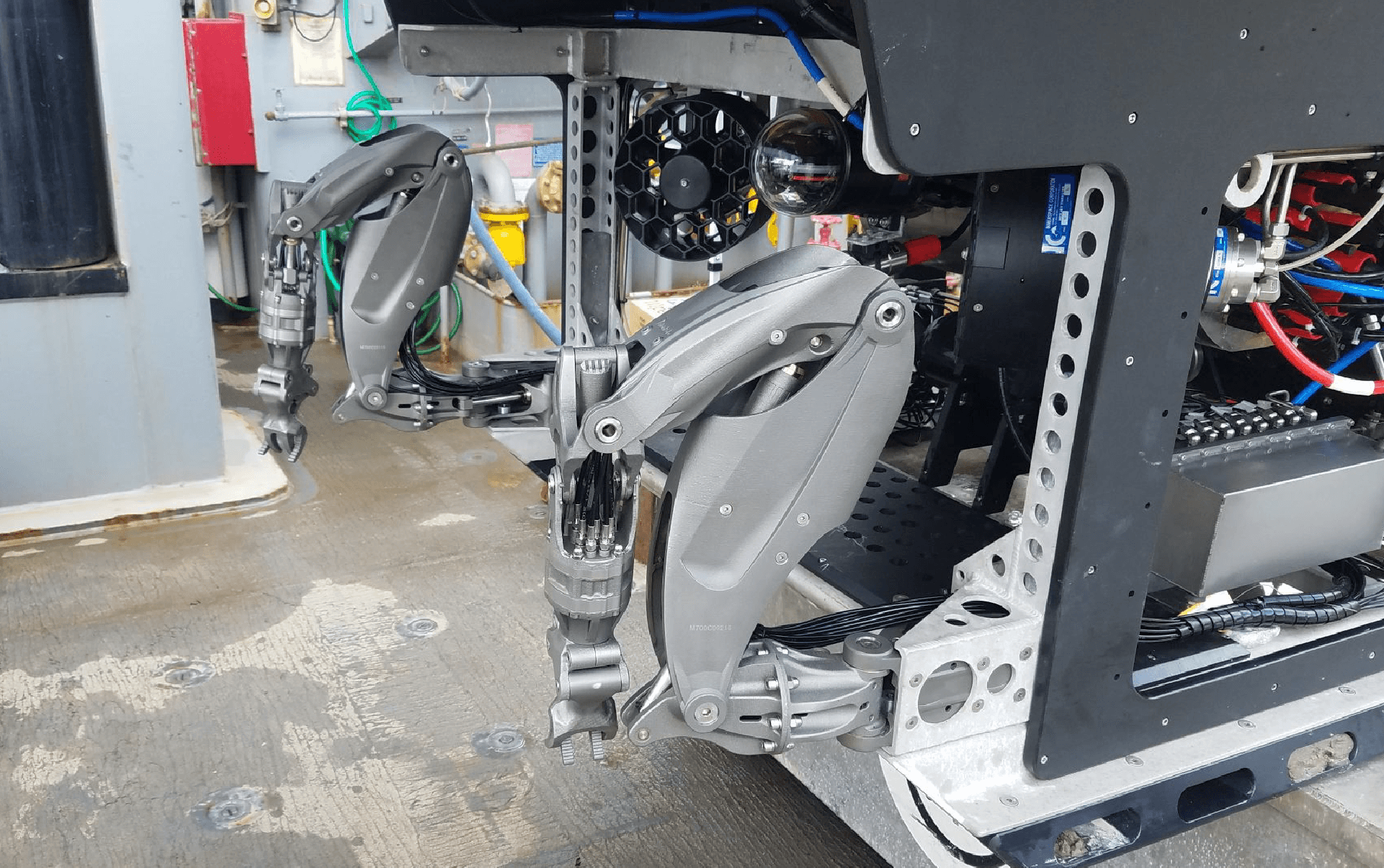
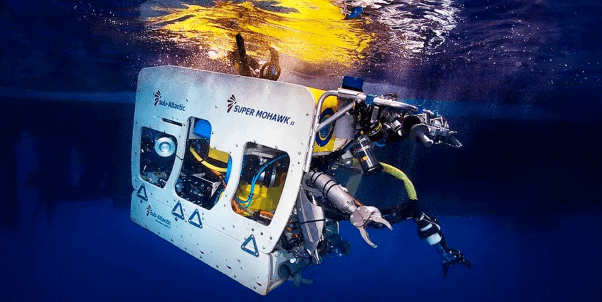
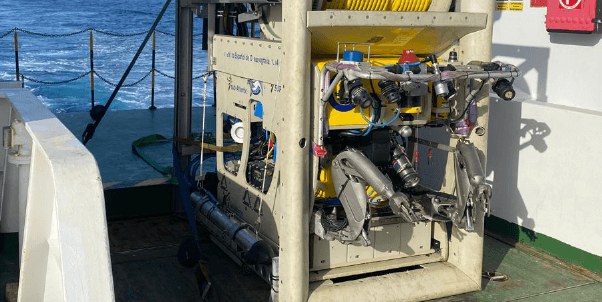
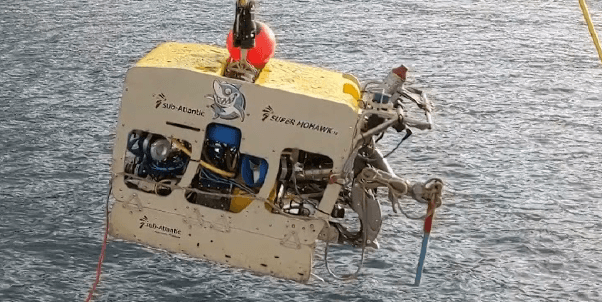
The TITANRob® is a titanium built hydraulic manipulator designed for heavy duty subsea applications in ROV (Remote Operated Vehicle) submarine operations. The original concept was developed in order to fulfil the gap between the big and heavy manipulators for WROV vehicles and the smaller electric light ROV with intervention capabilities underwater, where the weight of the vehicle equipment in the water is a must.
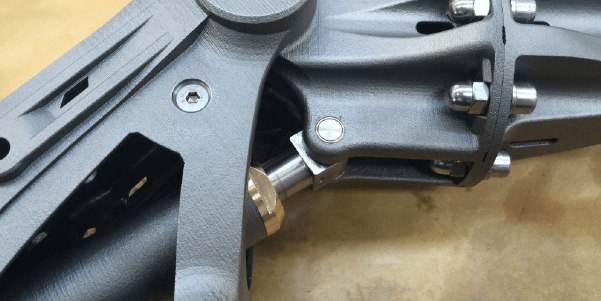
The TITANRob® is a manipulator with enhanced characteristics of weight/power ratio and capabilities: by using titanium as main material, lower weight and more mechanical characteristics are achieved, allowing improved dimensioning.
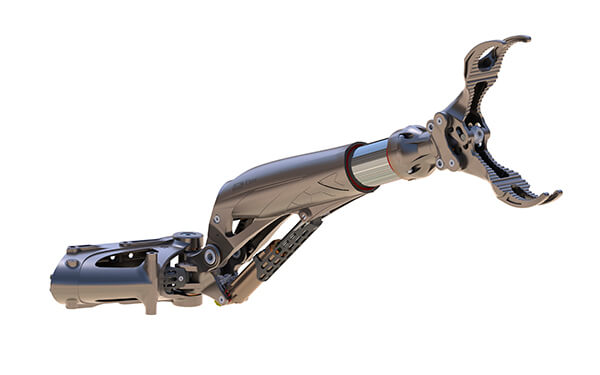
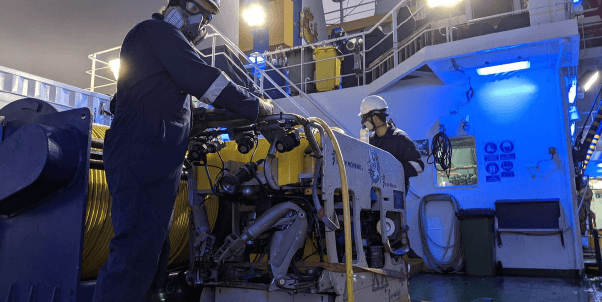
On the other hand, by using the same hydraulic power supply, the ROV vehicle has a more powerful and rugged tool, with lower weight and volume, improved capabilities, and thus allowing lower buoyancy needs. The prototype and development of this equipment was carried out by Quantum Innovative (www.quantuminnovative.es) and supported by ACSM (www.acsmships.com ) and Grupo CIMA (www.cima.uvigo.es), a very experienced local mechanical engineering research group in the University of Vigo (Spain).


TITANRob® by Quantum Innovative